import gymnasium as gym
import time
import torch as T
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import numpy as np
import matplotlib.pyplot as plt
import os
""" nvidia CUDA Toolkit 12.1
https://developer.nvidia.com/cuda-downloads?target_os=Windows&target_arch=x86_64&target_version=10&target_type=exe_local
Download cuda_12.1.1_531.14_windows.exe
"""
""" pip install
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/nightly/cu121
pip install gymnasium
pip install gymnasium[mujoco]
pip install matplotlib
pip install mujoco
"""
# 44.OUActionNOoiseクラスを作成する
class OUActionNoise(object):
def __init__(self, mu, sigma=0.15, theta=0.2, dt=1e-2, x0=None):
self.mu = mu
self.sigma = sigma
self.theta = theta
self.dt = dt
self.x0 = x0
self.reset()
def __call__(self):
x = self.x_prev + self.theta * (self.mu - self.x_prev) * self.dt + \
self.sigma * np.sqrt(self.dt) * np.random.normal(size=self.mu.shape)
self.x_prev = x
return x
def reset(self):
self.x_prev = self.x0 if self.x0 is not None else np.zeros_like(self.mu)
# 10. ReplayBufferクラスを新規作成する
class ReplayBuffer:
def __init__(self, max_memory_size, n_obs_space, n_action_space):
self.max_memory_size = max_memory_size
self.n_obs_space = n_obs_space
self.n_action_space = n_action_space
self.memory_count = 0
self.state_memory = np.zeros((self.max_memory_size, self.n_obs_space))
self.action_memory = np.zeros((self.max_memory_size, self.n_action_space))
self.reward_memory = np.zeros(self.max_memory_size)
self.next_state_memory = np.zeros((self.max_memory_size, self.n_obs_space))
self.terminal_memory = np.zeros(self.max_memory_size)
#self.terminal_memory = np.zeros(self.max_memory_size, dtype=np.bool)
# 11.トランジション保存のためstore_transitionメソドを作成する
def store_transition(self, obs, action, reward, next_state, done):
#print('store_transition is working.')
index = self.memory_count % self.max_memory_size # 最大メモリー数に到達したら、古いデータから上書きされていくギミック
#print('obs.detach().numpy().flatten():',obs.detach().numpy().flatten())
self.state_memory[index] = obs.detach().numpy().flatten()
self.action_memory[index] = action.flatten()
self.reward_memory[index] = reward.flatten()
self.next_state_memory[index] = next_state.flatten()
self.terminal_memory[index] = 1 - int(done) # ゴールならterminal = 0 となるように
#print('state_memory :', self.state_memory)
#print('action_memory :', self.action_memory)
#print('reward_memory :', self.reward_memory)
#print('next_state_memory :', self.next_state_memory)
#print('memory.state_memory :', self.terminal_memory)
#print('type of state_memory :', type(self.state_memory[0][0]))
#print('type of action_memory :', type(self.action_memory[0][0]))
#print('type of reward_memory :', type(self.reward_memory[0]))
#print('type of next_state_memory :', type(self.next_state_memory[0][0]))
#print('type of memory.state_memory :', type(self.terminal_memory[0]))
self.memory_count += 1
#print('memory_count :', agent.memory.memory_count)
# 16 バッファメモリーからランダムに抽出する
def sample_buffer(self, batch_size):
# indexが最大メモリに到達していない場合を想定する。
max_index = min(self.max_memory_size, self.memory_count)
choosed_index = np.random.choice(max_index, batch_size)
observations = self.state_memory[choosed_index]
actions = self.action_memory[choosed_index]
rewards = self.reward_memory[choosed_index]
next_states = self.next_state_memory[choosed_index]
terminals = self.terminal_memory[choosed_index]
return observations, actions, rewards, next_states, terminals
# 6.ActorNNクラスを新規作成する
class ActorNN(nn.Module):
def __init__(self, device, alpha=0.001, n_obs_space=17, n_action_space=6,
layer1_size=256, layer2_size=256, batch_size=64):
#print('ActorNN.__init__ is working.')
super(ActorNN, self).__init__()
self.fc1 = nn.Linear(n_obs_space, layer1_size)
self.fc2 = nn.Linear(layer1_size, layer2_size)
self.fc3 = nn.Linear(layer2_size, n_action_space)
#26.最適化処理としてアダムを設定する
#self.optimizer = optim.Adam(self.parameters(), lr=alpha)
self.optimizer = optim.SGD(self.parameters(), lr=alpha)
# 48. actorパラメータの読み出し
# もし、パラメータのデータが存在していたらそのパラメータで初期化する。
# パラメータファイルの存在チェック
"""
if os.path.isfile('actor_params.pt'):
# パラメータファイルが存在する場合はロード
self.load_state_dict(T.load('actor_params.pt', map_location=device))
print("パラメータファイルをロードしました:", 'actor_params.pt')
else:
print("パラメータファイルが見つかりません:", 'actor_params.pt')
"""
def forward(self, obs):
#print('AgetDDPG.ActorNN.forward is working')
#print('====ここまではOK1====')
x = self.fc1(obs)
x = F.relu(x)
x = self.fc2(x)
x = F.relu(x)
x = self.fc3(x)
action = F.tanh(x)
return action
# 22.CriticNNクラスを新規作成する
class CriticNN(nn.Module):
def __init__(self, device, beta=0.001, n_obs_space=17, n_action_space=6,
layer1_size=256, layer2_size=256, batch_size=64):
#print('CriticNN.__init__ is working.')
super(CriticNN, self).__init__()
# クリティックNNは観察空間+行動空間の2つを入力とする構造
input_dim = n_obs_space + n_action_space
self.fc1 = nn.Linear(input_dim, layer1_size)
self.fc2 = nn.Linear(layer1_size, layer2_size)
self.fc3 = nn.Linear(layer2_size, 1) # 最後は1個で良い
#27.最適化処理としてアダムを設定する
self.optimizer = optim.Adam(self.parameters(), lr=beta)
self.optimizer = optim.SGD(self.parameters(), lr=beta)
# 49. criticパラメータの読み出し
# もし、パラメータのデータが存在していたらそのパラメータで初期化する。
# パラメータファイルの存在チェック
"""
if os.path.isfile('critic_params.pt'):
# パラメータファイルが存在する場合はロード
self.load_state_dict(T.load('critic_params.pt', map_location=device))
print("パラメータファイルをロードしました:", 'critic_params.pt')
else:
print("パラメータファイルが見つかりません:", 'critic_params.pt')
"""
def forward(self, obs, action):
input_data = T.cat([obs, action], dim=1)
x = self.fc1(input_data)
x = F.relu(x)
x =self.fc2(x)
x = F.relu(x)
x = self.fc3(x)
return x #一つの状態価値を出力する。
# 3.エージェントクラスを定義する
class AgentDDPG:
def __init__(self, device, alpha=0.000025, beta=0.00025, gamma=0.99, tau=0.001,
n_obs_space=17 , n_action_space=6, n_state_action_value=1,
layer1_size=64, layer2_size=64, batch_size=64, mode='train_mode'):
#print('AgentDDPG.__init__ is working.')
# 5.ActorNNクラスのインスタンスを生成する
self.device = device
self.alpha = alpha
self.beta = beta
self.gamma = gamma
self.tau = tau
self.n_obs_space = n_obs_space
self.n_action_space = n_action_space
self.n_state_action_value = n_state_action_value
self.layer1_size = layer1_size
self.layer2_size = layer2_size
# 13.バッチサイズを決めておく
self.batch_size = batch_size
self.actor = ActorNN(device=self.device, alpha=0.000025, n_obs_space=17, n_action_space=6,
layer1_size=64, layer2_size=64, batch_size=64)
if os.path.isfile('actor_params.pt'):
# パラメータファイルが存在する場合はロード
self.actor.load_state_dict(T.load('actor_params.pt', map_location=device))
print("パラメータファイルをロードしました:", 'actor_params.pt')
else:
print("パラメータファイルが見つかりません:", 'actor_params.pt')
# actorネットワークをGPUへ転送
self.actor.to(device)
# 9.memoryインスタンスを追加
self.MAX_MEMORY_SIZE = 10000
self.memory = ReplayBuffer(max_memory_size=self.MAX_MEMORY_SIZE,
n_obs_space=self.n_obs_space,
n_action_space=self.n_action_space)
# 19.ターゲットアクターネットワークインスタンスtarget_actorを作成する
# actorとtarget_actorのネットワークは同じActorNNで良い
self.target_actor = ActorNN(device=self.device, alpha=0.000025, n_obs_space=17, n_action_space=6,
layer1_size=64, layer2_size=64, batch_size=64)
if os.path.isfile('target_actor_params.pt'):
# パラメータファイルが存在する場合はロード
self.target_actor.load_state_dict(T.load('target_actor_params.pt', map_location=device))
print("パラメータファイルをロードしました:", 'target_actor_params.pt')
else:
print("パラメータファイルが見つかりません:", 'target_actor_params.pt')
# target_actorネットワークをGPUへ転送
self.target_actor.to(device)
# 21.ターゲットクリティックネットワークインスタンスtareget_criticを作成する
self.target_critic = CriticNN(device=self.device, beta=0.000025, n_obs_space=17, n_action_space=6,
layer1_size=64, layer2_size=64, batch_size=64)
if os.path.isfile('target_critic_params.pt'):
# パラメータファイルが存在する場合はロード
self.target_critic.load_state_dict(T.load('target_critic_params.pt', map_location=device))
print("パラメータファイルをロードしました:", 'target_critic_params.pt')
else:
print("パラメータファイルが見つかりません:", 'target_critic_params.pt')
# target_criticネットワークをGPUへ転送
self.target_critic.to(device)
# 24.クリティックネットワークインスタンスcriticを作成する。
self.critic = CriticNN(device=self.device, beta=0.000025, n_obs_space=17, n_action_space=6,
layer1_size=64, layer2_size=64, batch_size=64)
if os.path.isfile('critic_params.pt'):
# パラメータファイルが存在する場合はロード
self.critic.load_state_dict(T.load('critic_params.pt', map_location=device))
print("パラメータファイルをロードしました:", 'critic_params.pt')
else:
print("パラメータファイルが見つかりません:", 'critic_params.pt')
# criticネットワークをGPUへ転送
self.critic.to(device)
# アクターロスとクリティックロス
self.actor_loss = 0
self.critic_loss = 0
# 45.行動ノイズのインスタンス化
self.mode = mode
if self.mode == 'train_mode':
self.noise = OUActionNoise(mu=np.zeros(n_action_space))
elif self.mode == 'eval_mode':
self.noise = OUActionNoise(mu=np.zeros(n_action_space), sigma=0)
else:
print('mode error')
def choose_action(self, obs): # GPU対応済み
#print('AgentDDPG.choose_action is working.')
# 4.方策(アクター)はニューラルネットワークで表現する。
# ActorNNクラスを新規作成し、インスタンスactorとして使用する。
obs = obs.to(device)
action = self.actor.forward(obs)
action = action.cpu()
# 46.行動ノイズを入れて探索性を向上させる。
action += T.tensor(self.noise(), dtype=T.float32)
action = action.detach().numpy()
return action
# 8.remenberメソドを追加
def remember(self, obs, action, reward, next_state, done):
self.memory.store_transition(obs, action, reward, next_state, done)
# 13.learnメソドを追加
def learn(self):
# 14.バッチサイズ分のトランジションが集まるまでは何も実行しない。
if self.memory.memory_count < self.batch_size:
return
# 15.メモリバッファからデータを抜き出す sample_buffer()
# バッチ化されているので変数名を複数形にする
observations, actions, rewards, next_states, terminals = self.memory.sample_buffer(self.batch_size)
#print('s:', observations)
#print(observations.shape)
#print('a :', actions)
#print('r :', rewards)
#print('s_ :', next_states)
#print('terminal :', terminals)
# 17.抜き出したデータをpytorchで微分可能なようにtorch.tensor化する
observations = T.tensor(observations, dtype=T.float32).to(device)
actions = T.tensor(actions, dtype=T.float32).to(device)
rewards = T.tensor(rewards, dtype=T.float32).to(device)
next_states = T.tensor(next_states, dtype=T.float32).to(device)
terminals = T.tensor(terminals, dtype=T.float32).to(device)
# 18.ターゲットアクターネットワークインスタンスtarget_actorに
# 次の状態next_satesを入れて、ターゲットアクションtarget_actionsとして取り出す。
# このターゲットネットワークはターゲットでないネットワークとNNパラメータを共有させる。
#print('next_states :', next_states)
target_actions = self.target_actor.forward(next_states)
# 20.ターゲットクリティックネットワークインスタンスtarget_criticに
# 次の状態next_statesと上記より算出したターゲットアクションの2つを入力して
# 価値関数の推定値ターゲットバリューを出力する。
# TDターゲット:r + γ*V(w)[s_t+1] の部分のこと。
# ターゲットクリティックバリューはターゲットアクターネットワークを使う
target_critic_values = self.target_critic.forward(next_states, target_actions)
# 23.ベースラインとして機能するクリティックネットワーク(価値関数V(w)[s_t]ネットワーク)に
# 現在の状態observationsと行動actionsを入力して
# クリティックバリューを算出する
critic_values = self.critic.forward(observations, actions)
# 25.TDターゲットを算出する:r + γ*V(w)[s_t+1]
td_targets = []
for i in range(self.batch_size):
td_target = rewards[i] + self.gamma * target_critic_values[i] * terminals[i]
td_targets.append(td_target)
# TDターゲットの形をバッチに整える
td_targets = T.tensor(td_targets, dtype=T.float32).to(device)
td_targets = td_targets.view(self.batch_size, 1) #viewはreshapeと同じ。64x1に見え方を変更した、という意味
#print('td_targets :', td_targets)
# ==== (1)クリティックの学習 ====
# 28.クリティックの勾配をゼロに初期化する
self.critic.optimizer.zero_grad()
# 29. TDターゲットと状態価値の二乗誤差を算出して、クリティックの損失関数とする。バッチサイズは64個
critic_loss = F.mse_loss(td_targets, critic_values)
self.critic_loss = critic_loss
#print('critic_loss : ', critic_loss) # tensor(0.0485, grad_fn=<MseLossBackward0>)
# 30. クリティックの損失関数を微分して、勾配を算出する
critic_loss.backward()
# 31. 勾配からオプティマイザーによってクリティックのパラメータ(重みとバイアス)を更新する
self.critic.optimizer.step()
# ==== (2)アクターの学習 ====
# 32. アクターの勾配をゼロに初期化する
self.actor.optimizer.zero_grad()
# 33. アクターに観測情報を入力して行動を算出する。バッチサイズは64個
predicted_actions = self.actor.forward(observations)
# 34.アクターの損失関数を算出する
# Actorの目的は、Criticネットワークの出力(行動価値)を最大化するような行動を選択すること。
# なので、actorNN→criticNNのDDPG構造全体の出力結果をactor_lossとして、actorNNとcriticNNの両方をbackwardし、
# actorだけをパラメータ更新することによりactorの学習をすることができる。
actor_loss = -self.critic.forward(observations, predicted_actions)
actor_loss = T.mean(actor_loss)
self.actor_loss = actor_loss
#print(f'actor_loss: {actor_loss}, critic_loss: {critic_loss}')
# 35. DDPG構造全体の損失関数actor_lossを微分し、勾配を算出する
actor_loss.backward()
# 36. 勾配からオプティマイザーによってアクターのパラメータだけを(重みとバイアス)を更新する
self.actor.optimizer.step()
# 37. 全ニューラルネットワークのパラメータを更新する。
self.update_network_parameters()
# 37. パラメータ更新メソド。
def update_network_parameters(self, tau=None):
if tau is None:
tau = self.tau
# 38. actor, critic, target_actor, target_criticのネットワーク内の全てのパラメータ(重みとバイアス)とその名前を取得する
# actorとcriticは先ほど更新されたばかりのパラメーター
actor_params = self.actor.named_parameters()
critic_params = self.critic.named_parameters()
target_actor_params = self.target_actor.named_parameters()
target_critic_params = self.target_critic.named_parameters()
#print('actor_params : ', actor_params) # actor_params : <generator object Module.named_parameters at 0x000001661B2D9D48>
# 39. パラメータをディクショナリとして取り出す。
actor_params_dict = dict(actor_params)
critic_params_dict = dict(critic_params)
target_actor_params_dict = dict(target_actor_params)
target_critic_params_dict = dict(target_critic_params)
#print('actor_params_dict : ', actor_params_dict)
#print(actor_params_dict.keys())
"""
actor_params_dict : {'fc1.weight': Parameter containing:
tensor([[-0.1895, -0.0343, 0.1138, ..., 0.2157, 0.0527, -0.1173],/
dict_keys(['fc1.weight', 'fc1.bias', 'fc2.weight', 'fc2.bias', 'fc3.weight', 'fc3.bias'])
"""
# 40. クリティックの各パラメーター毎に 更新重みtau=0.0001の分だけほんの少しcriticパラメータをtarget_criticパラメータに近づける。
for name in critic_params_dict:
critic_params_dict[name] = tau * critic_params_dict[name].clone() + \
(1-tau) * target_critic_params_dict[name].clone()
# 41. 更新したcriticパラメータをtarget_criticのパラメータとしてロードする。
self.target_critic.load_state_dict(critic_params_dict)
# 42.アクターの各パラメーター毎に 更新重みtau=0.0001の分だけほんの少しactorパラメータをtarget_actorパラメータに近づける。
for name in actor_params_dict:
actor_params_dict[name] = tau * actor_params_dict[name].clone() + \
(1 - tau) * target_actor_params_dict[name].clone()
# 43. 更新したactorパラメータをtarget_actorのパラメータとしてロードする。
self.target_actor.load_state_dict(actor_params_dict)
#### =================== メインスクリプト ======================= ####
device = T.device('cuda' if T.cuda.is_available() else 'cpu') # cuda追加
device = 'cpu' # 強制的にcpuを使う
EVAL_TRAIN_MODE = 'eval_mode' # eval_mode 評価モードか train_mode 訓練モードかを選択
EPISODES = 501 # episodes
STEPS = 500 # steps
DELAY_TIME = 0.00 # sec
print('Selected Mode : ', EVAL_TRAIN_MODE)
# 2.エージェントクラスのインスタンスを生成する
agent = AgentDDPG(device=device, alpha=0.01, beta=0.01, gamma=0.99, tau=0.01,
n_obs_space=17 , n_action_space=6, n_state_action_value=1,
layer1_size=64, layer2_size=64, batch_size=64, mode=EVAL_TRAIN_MODE) # cuda追加
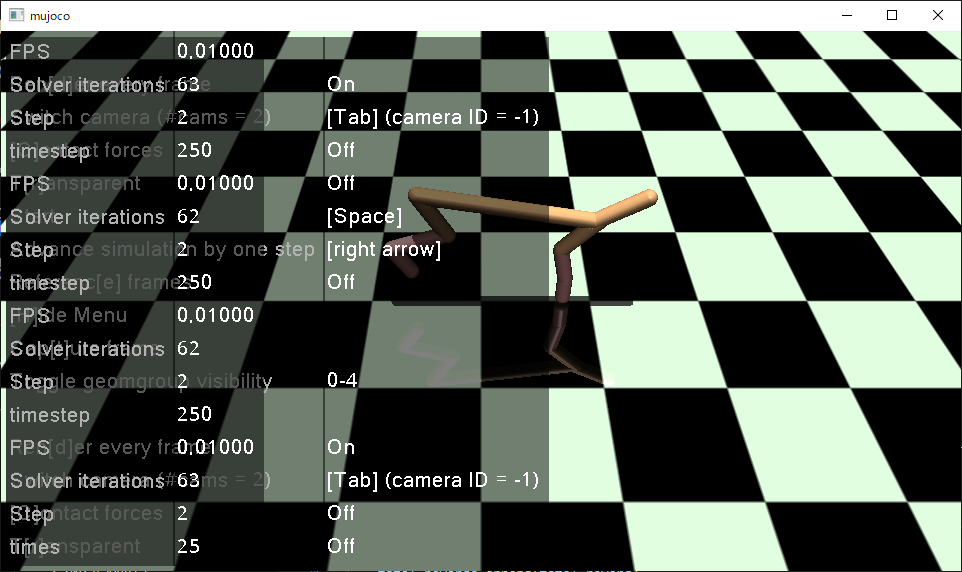
if EVAL_TRAIN_MODE == 'train_mode':
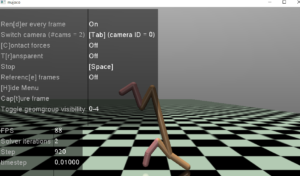
env = gym.make("HalfCheetah-v4", render_mode='depth_array')
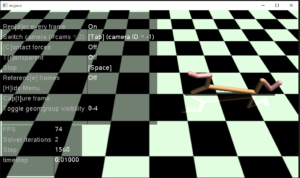
elif EVAL_TRAIN_MODE == 'eval_mode':
env = gym.make("HalfCheetah-v4", render_mode= 'human')
total_rewards = []
actor_losses = []
critic_losses = []
for episode in range(EPISODES):
obs = env.reset()
obs = T.tensor(obs[0], dtype=T.float)
# tensor([ 0.0040, 0.0199, -0.0622, 0.0594, -0.0605, 0.0577, -0.0056, 0.0333, -0.0072, 0.0532, -0.0512, 0.0173, -0.0529, -0.1104, 0.0946, -0.0559, 0.0824])
#print(type(obs))
# observation_space : Box(-inf, inf, (17,), float64)
#print('observation_space : ', env.observation_space)
#print('obs :', obs)
reward: float = 0
total_reward: float = 0
done: bool = False
for j in range(STEPS):
env.render()
# ここをDDPGに置き換えていく
action = agent.choose_action(obs) # 1.Agentクラスを定義していく # GPU対応済み
#action : [ 0.06660474 -0.11753064 0.02527559 0.06465236 0.1050786 0.05048539]
#print('====ここまではOK4====')
#print('action_space : ', env.action_space)
#print('action : ', action)
next_state, reward, done, _, info = env.step(action)
#print('next_state, reward, done, _, info :', next_state, reward, done, _, info)
"""
action : [ 0.06660474 -0.11753064 0.02527559 0.06465236 0.1050786 0.05048539]
next_state, reward, done, _, info :
[-0.00265179 0.0229547 0.00463243 -0.04729936 -0.00959038 0.04734605
0.03672746 0.02857842 0.09980254 -0.32065693 0.04221647 1.58668951
-2.31089174 1.30338924 -0.25465526 1.08250465 -0.14134398]
0.07553858359316026
False
False
{'x_position': -0.09233384215910741, 'x_velocity': 0.07920445513883267, 'reward_run': 0.07920445513883267, 'reward_ctrl': -0.0036658715456724168}
"""
#7. トラジェクトを保存する。経験再生(ReplayBuffer)
agent.remember(obs, action, reward, next_state, int(done))
#12. ニューラルネットワークを学習する
agent.learn()
# 26.エピソード内での報酬を累積していく
total_reward += reward
# 27. next_stateをobsとして再出発する
#print('next_state:', next_state)
obs = next_state
obs = T.tensor(obs, dtype=T.float)
# 28. チーターの動きを見たいのでスリープを入れる
time.sleep(DELAY_TIME)
#print('total_reward : ', total_reward)
total_rewards.append(total_reward)
actor_losses.append(float(agent.actor_loss))
critic_losses.append(float(agent.critic_loss))
# print('epsisode', i, 'score %.2f' % score, '100 game sverage %.2f' % np.mean(score_history[-100:]))
# 47. 各ニューラルネットワークのパラメータを10エピソード毎に保存する
print('episode, total_reward : ', episode , total_reward)
if episode % 10 == 0:
T.save(agent.actor.state_dict(), 'actor_params.pt')
T.save(agent.critic.state_dict(), 'critic_params.pt')
T.save(agent.target_actor.state_dict(), 'target_actor_params.pt')
T.save(agent.target_critic.state_dict(), 'target_critic_params.pt')
print('==== params were saved. ====')
#print('total_rewards : ', total_rewards)
#plt.plot(total_rewards)
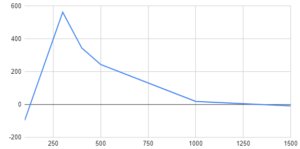
#plt.plot(actor_losses, label='actor_losses')
#plt.plot(critic_losses, label='critic_losses')
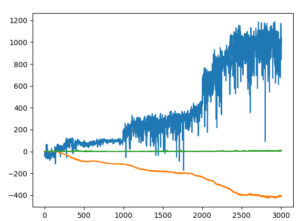
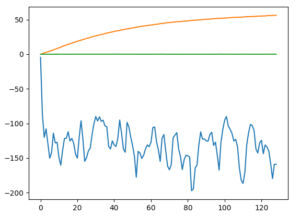
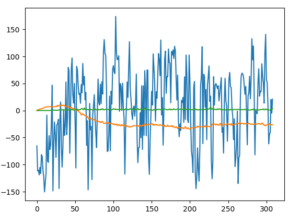
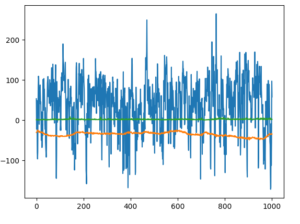
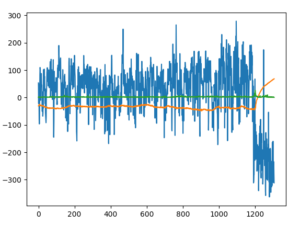
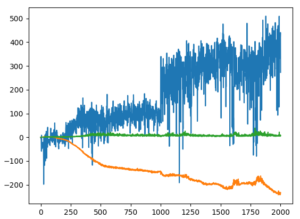
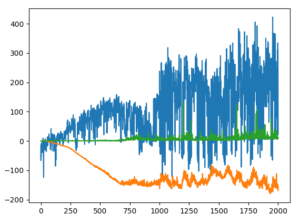
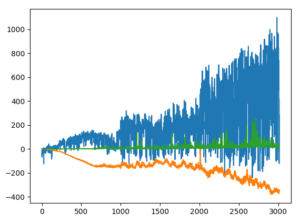
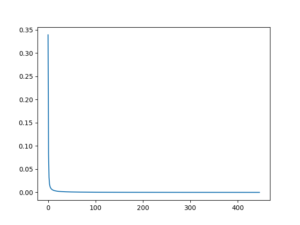
plt.plot(total_rewards, label='total_rewards')
plt.legend()
plt.grid(True)
plt.ioff()
plt.show()
env.close() # 空なんですけど・・・
print('script is done.')
# https://gymnasium.farama.org/
"""
episods=11 step=500
GPUで80秒
CPUで48秒
episods=5 step=500
GPUで40秒
CPUで25秒
結論 CPUのほうが速い!!
intel core i7-8700cpu 3.2GHz
"""