keita_nakamoriです。
前回、レイの使い方を学んだので、今回はレイ対象にパーティクルシステムを適用してみようと思います。
レイで対象を検知したときにパーティクルシステムを適用しながらカウントダウンし、さらにカウントダウンが終わったらオブジェクトExplosion.prefabで爆発エフェクトをかけるという手順です。
KillTarget スクリプト
物騒なスクリプト名ですが、やっていきましょう。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 |
using System.Collections; using System.Collections.Generic; using UnityEngine; public class KillTarget : MonoBehaviour { //GameControllerというemptyObjectをヒエラルキーにいれて、 //以降、このGameControllerの中にゲーム全体を司るコントローラー類を設置していく。 //当該スクリプトKillTargetもゲームコントローラーであるため //インスペクター上でGameControllerへadd componentする。 //パブリック変数定義 public GameObject target;//衝突ターゲット認識用 public ParticleSystem hitEffect;//ヒットエフェクト用 public GameObject killEffect;//キルエフェクト用 public float timeToSelect=3.0f;//カウントダウンタイマー初期値用 public int score;//キルスコア用 //プライベート変数定義 private ParticleSystem.EmissionModule hitEffectEmission;//なにこれ? private float countDown;//カウントダウンタイマー用 void Start () { //スコアscoreを初期化 score = 0; //カウントダウンタイマーをセット countDown = timeToSelect; //ヒットエフェクトエミッションのインスタンスを作成 hitEffectEmission = hitEffect.emission; //ヒットエフェクトエミッションの使用許可をOFF hitEffectEmission.enabled = false; } void Update() { //アクティブなカメラの座標を得る Transform camera = Camera.main.transform; //レイの方向を定義する Ray ray = new Ray(camera.position, camera.rotation * Vector3.forward); //レイを飛ばして、kill対象オブジェクトとの衝突を検知する //変数hitに衝突オブジェクトの詳細情報が入っている RaycastHit hit; if (Physics.Raycast(ray, out hit) && (hit.collider.gameObject == target)) { //さらに条件として、countDownがゼロより大きければヒットエフェクトを実行する if (countDown > 0.0f) { //カウントダウンする countDown -= Time.deltaTime; //レイが衝突している座標をヒットエフェクトの座標にする hitEffect.transform.position = hit.point; //ヒットエフェクトを出す hitEffectEmission.enabled = true; } //countDownが0になったらキルエフェクトを実行する。Explosion.prefabをアタッチする。 else { //killEffectをコピーする Instantiate(killEffect, target.transform.position, target.transform.rotation); //スコアを1点増やす score += 1; //カウントダウンタイマーを初期値に戻す countDown = timeToSelect; //ランダムな位置にkill対象オブジェクトを矯瞬間移動させる。 //その場から消えて、他の場所で復活したように見える。 SetRandomPosition(); } } //レイを飛ばして、kill対象オブジェクトと衝突していなければ、countDownを初期化する else { countDown = timeToSelect; //ヒットエフェクトは出さない hitEffectEmission.enabled = false; } } //ランダムな位置にオブジェクトを出現させる void SetRandomPosition() { //ランダム座標を定義する float x = Random.Range(-5.0f, 5.0f); float z= Random.Range(-5.0f, 5.0f); //ランダム座標をtargetオブジェクトの座標に代入する。 //ランダムな位置にkill対象オブジェクトを矯瞬間移動させる。 //その場から消えて、他の場所で復活したように見える。 target.transform.position = new Vector3(x, 0.0f, z); } } //次回課題:遅延タイミング管理のスクリプトのコルーチンを使うようリファクタリングする。 |
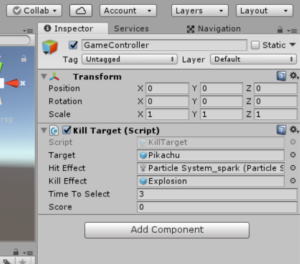
Targetを設定する。
爆破したいオブジェクトをGameControllerのインスペクターにドラッグしましょう。
後述しますが、パーティクルシステムとKillEffectも合わせてドラッグすると最終的に下記のようになります。
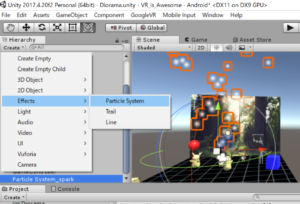
パーティクルシステムを設定する。
ヒエラルキー>Create>Effects>Particle Systemと開くとParticle Systemが作成されるので、それをGameControllerのインスペクターにドラッグしましょう。
killEffectを設定する。
Standerd Asset>Particle Prefabs>ExplosionをGameControllerのインスペクターにドラッグしましょう。