
前回は、数値の出力まででしたので、今回はリアルタイムプロットに挑戦します。
グラフ付きスクリプト
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 |
# -*- coding: utf-8 -*- import smbus import math from time import sleep from time import perf_counter import time import matplotlib.pyplot as plt #mpu6050のデバイスアドレス(決まっている) DEV_ADDR = 0x68 ACCEL_XOUT = 0x3b ACCEL_YOUT = 0x3d ACCEL_ZOUT = 0x3f TEMP_OUT = 0x41 GYRO_XOUT = 0x43 GYRO_YOUT = 0x45 GYRO_ZOUT = 0x47 PWR_MGMT_1 = 0x6b PWR_MGMT_2 = 0x6c # sudo i2cdetect 0 : Error: Could not open file `/dev/i2c-0' or `/dev/i2c/0' # sudo i2cdetect 1 : I will probe file /dev/i2c-1 # エラーの出ない方がバス番号(0 か 1) # コネクションオブジェクトを取得 bus = smbus.SMBus(1) # write_byte_data(アドレス, コマンド, 1バイトの値) # スリープを解除 多分(最初はスリープしている) bus.write_byte_data(DEV_ADDR, PWR_MGMT_1, 0) # make plot times = [0 for i in range(60)] axs = [0 for i in range(60)] time = 0 ax = 0 # initialize matplotlib plt.ion() plt.figure() li_x, = plt.plot(times, axs) # need " , " #li_y, = plt.plot(times, ays) # need " , " #li_z, = plt.plot(times, azs) # need " , " #plt.xlim(-1,1) plt.ylim(-2,2) plt.xlabel("time") plt.ylabel("ax,ay,az") plt.title("ax,ay,az real time plot") def read_word(adr): high = bus.read_byte_data(DEV_ADDR, adr) low = bus.read_byte_data(DEV_ADDR, adr+1) val = (high << 8) + low return val def read_word_sensor(adr): #2バイトデータから 1ワードデータへデコードする val = read_word(adr) if (val >= 0x8000): return -((65535 - val) + 1) else: return val def get_temp(): # 温度を算出する temp = read_word_sensor(TEMP_OUT) x = temp / 340 + 36.53 # data sheet(register map)記載の計算式. return x def getGyro(): # 3軸 角速度を算出する x = read_word_sensor(GYRO_XOUT)/ 131.0 y = read_word_sensor(GYRO_YOUT)/ 131.0 z = read_word_sensor(GYRO_ZOUT)/ 131.0 return [x, y, z] def getAccel(): # 3軸 加速度を算出する x = read_word_sensor(ACCEL_XOUT)/ 16384.0 y= read_word_sensor(ACCEL_YOUT)/ 16384.0 z= read_word_sensor(ACCEL_ZOUT)/ 16384.0 return [x, y, z] # Define initial time t_init = perf_counter() while perf_counter() - t_init < 60.0 : t = perf_counter() - t_init # 3軸 加速度を算出し出力する ax, ay, az = getAccel() print ('{0:4.3f}, {1:4.3f}, {2:4.3f}, {3:4.3f}' .format(t, ax, ay, az)) #最新のデータを追加すると同時に最初のデータを削除する times.append(t) times.pop(0) axs.append(ax) axs.pop(0) #ays.append(ax) #ays.pop(0) #azs.append(ax) #azs.pop(0) # 区間プロットする li_x.set_xdata(times) li_x.set_ydata(axs) plt.xlim(min(times), max(times)) plt.draw() # plt.ion()に対応 (plt.show()ではない) plt.pause(0.01) sleep(0.02) |
リアルタイムプロット
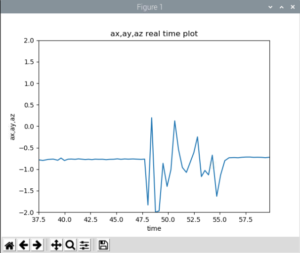
できました! 以上です。